Representing Egocentric Directions with Torso-Applied Vibrotactile Stimuli
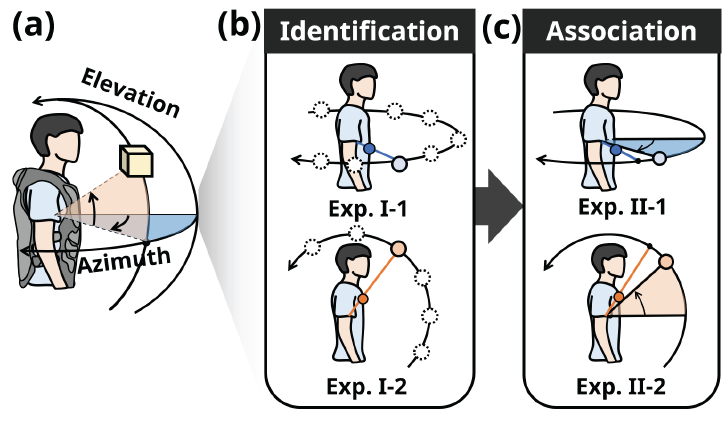
Fig. 1. Azimuth and elevation define egocentric directions (a). Torso-based tactile direction cueing involves stimulus identification (b) and direction association (c), studied across four experiments.
Abstract
This paper investigates egocentric directional perception of azimuth and elevation in response to torso-based vibrotactile stimuli for both stimulus identification and direction association under a common experimental framework. We conducted four perceptual experiments that examined the two tasks for azimuth and elevation, using real vibrations and illusory stimuli generated by the funneling illusion. The results demonstrated that adding illusory stimuli effectively conveyed directional information with fewer tactors than using only real stimuli. Azimuth perception revealed a lateral bias, whereas elevation perception exhibited a downward bias on the dorsal torso, particularly in the upper back. However, both azimuth and elevation cues were generally consistent across vertical and horizontal torso locations. Additionally, we estimated regression models for both egocentric angles and showed that perceived directions could be estimated from actual stimulus positions. Correlation analysis revealed a weak relationship between azimuth and elevation perceptual errors, suggesting that these dimensions are processed with near-independence. Across all findings, azimuth cues proved to be more effective than elevation cues in conveying directional information. This study provides a comprehensive understanding of egocentric directions and offers practical insights for the design of torso-based vibrotactile displays.
Key Contributions
- 1
First unified experimental framework examining both azimuth and elevation perception for stimulus identification and direction association on the full torso
- 2
Demonstrated that illusory stimuli (funneling illusion) effectively convey directional information with fewer physical tactors, doubling spatial resolution from 8 to 16 azimuths
- 3
Revealed that the upper torso (chest and solar plexus) outperforms the waist for azimuth cueing, while the abdomen and upper back show reduced elevation identification accuracy
- 4
Established regression models that accurately map physical stimulus positions to perceived egocentric directions — enabling data-driven haptic vest design
- 5
Showed that azimuth and elevation perception errors are nearly independent (r = 0.08), suggesting minimal cross-axis interference in torso-based directional cueing
Apparatus
A commercial haptic vest (bHaptics TactSuit X40) was customized to precisely control vibration positions on the torso. Vibration motors were removed from the inner vest and placed into 3D-printed housings mounted on three adjustable belt straps. Each belt contained eight motors arranged at cardinal and intercardinal directions. An additional motor was affixed to each shoulder, yielding 26 stimulation points in total. Real stimuli (10 G, 61 Hz) and illusory stimuli (funneling illusion, 7 G each) were delivered to represent azimuths and elevations.
26
Vibration Points
8×3 torso + 2 shoulder
4
Experiments
2 identification + 2 association
12/exp
Participants
per sub-experiment
61 Hz
Stimulus Frequency
10 G amplitude
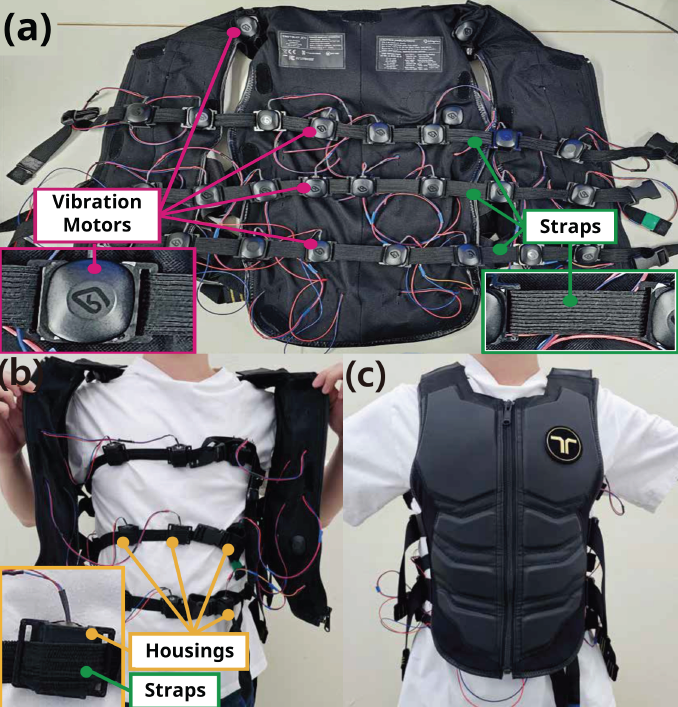
Fig. 3. The customized haptic suit: (a) overall structure showing vibration motors and straps, (b) fitting motors to the torso, and (c) final wearable configuration.
Exp. I: Azimuth & Elevation Identification
Two experiments measured how accurately participants identified vibrotactile cues representing azimuth (Exp. I-1, 8 or 16 directions) and elevation (Exp. I-2, 6–13 levels). Both compared real-only (REL) and real+illusory (R+I) stimulus conditions.
N = 12 participants
Participants identified vibrotactile stimuli placed around the torso at three vertical levels (TOP, MID, BTM). REL sub-experiment used 8 real stimuli; R+I added 8 illusory stimuli for 16 total azimuths.
N = 12 participants
Participants identified vibrotactile stimuli placed vertically on the torso at two horizontal levels (MID and LFT). Upper back and abdominal regions showed notably lower accuracy.
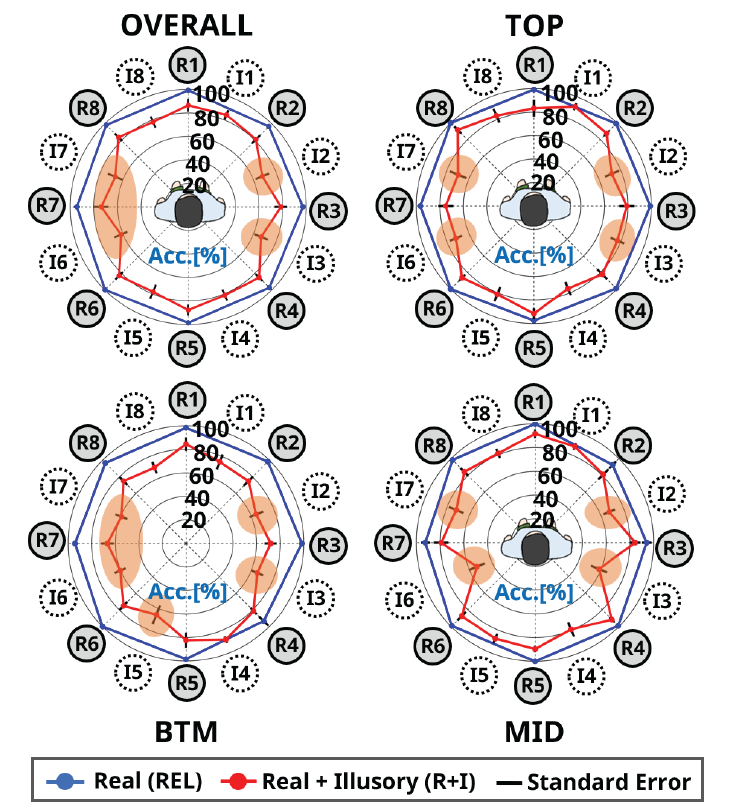
Fig. 5. Azimuth identification accuracies with standard errors (Exp. I-1). Orange areas indicate stimuli with significantly lower accuracy.
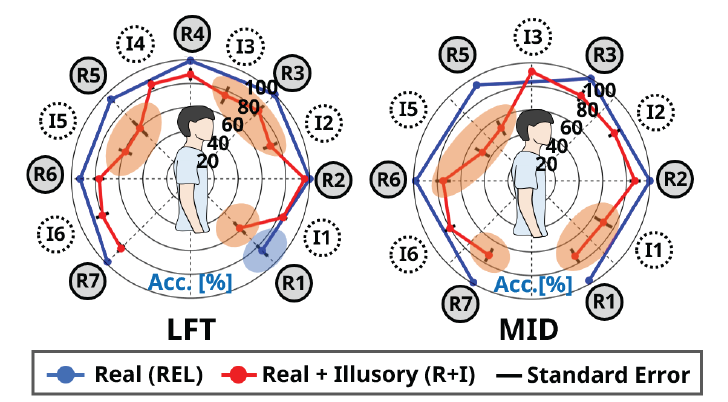
Fig. 6. Elevation identification accuracies with standard errors (Exp. I-2). Blue and orange areas mark regions of reduced performance.
Exp. II: Direction Association & Regression Models
Two experiments measured how participants naturally associate vibrotactile stimuli with egocentric directions — azimuth (Exp. II-1) and elevation (Exp. II-2) — without explicit training constraints. Fourier regression models were fit to characterize the physical-to-perceived angle mapping.
N = 12 participants
Participants freely associated vibrotactile stimuli with egocentric azimuth angles using a touchscreen dial. Regression models were built from the collected data.
N = 12 participants
Participants indicated perceived elevation for each torso stimulus. Downward bias observed on the dorsal torso; regression captured nonlinear mapping from actual to perceived elevation.
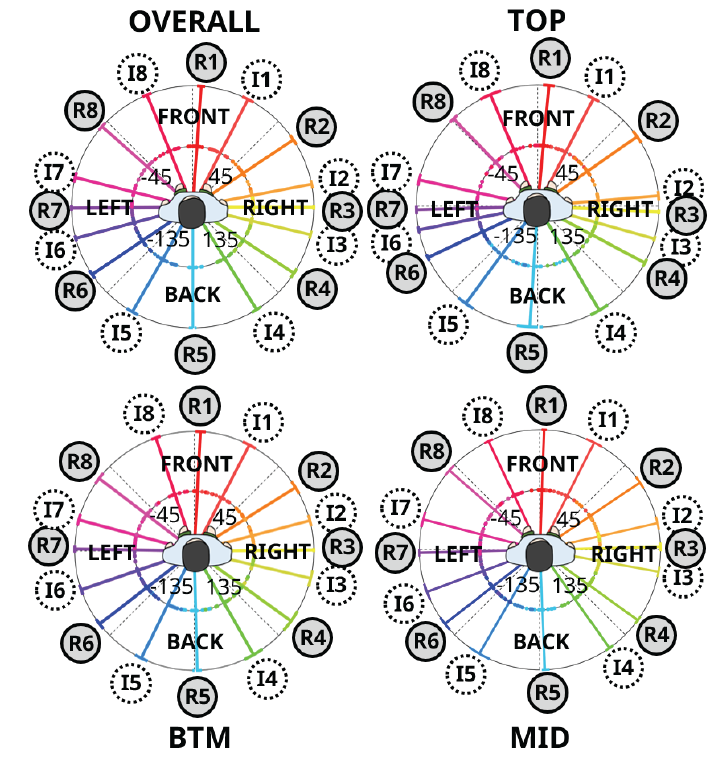
Fig. 9. Associated azimuths across three torso heights (TOP, MID, BTM) and overall. Stimuli show clear lateral bias for intercardinal positions.
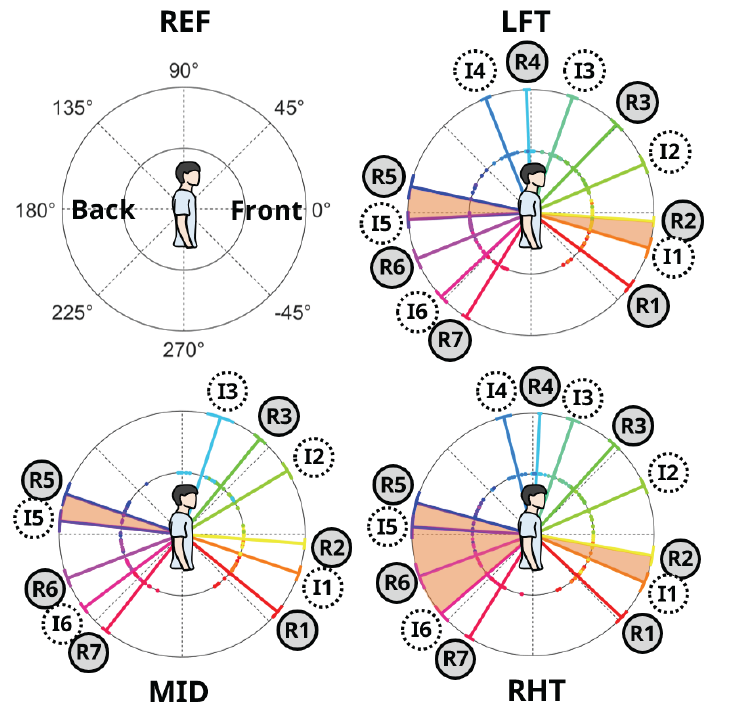
Fig. 12. Associated elevations across LFT, MID, and RHT torso positions. Orange shading denotes stimuli with non-significant pairwise differences.
Key Findings & Design Implications
Findings from all four experiments offer practical guidelines for designing torso-based vibrotactile directional displays.
Lateral bias in azimuth
Stimuli at intercardinal positions (~45°, 135°) were systematically perceived ~9.4° toward the lateral sides, attributed to the elliptical torso cross-section.
Downward bias in elevation
Dorsal torso stimuli — especially the upper back — were consistently associated with lower perceived elevations than ventral stimuli at the same height.
Upper torso advantage
Stimuli at the chest (TOP) and solar plexus (MID) allowed significantly higher azimuth identification accuracy than the waist (BTM).
Illusory stimuli double resolution
Combining 8 real and 8 illusory stimuli increased effective azimuths from 8 to 16 directions (22.5° resolution) with only ~20% accuracy drop.
Near-independent dimensions
Pearson's r = 0.08 between azimuth and elevation MAEs confirms that these two directional dimensions are processed with near-independence.
Consistent across torso regions
Both azimuth and elevation cues showed consistent perceptual patterns across the full torso, validating haptic vest designs that use multiple belt positions.
Citation
@article{Kim2026:representing,
author={Kim, Junwoo and Park, Jaejun and Park, Chaeyong and Park, Junseok and Choi, Seungmoon},
journal={IEEE Transactions on Haptics},
title={Representing Egocentric Directions With Torso-Applied Vibrotactile Stimuli},
year={2026},
volume={},
number={},
pages={1-13},
keywords={Azimuth;Torso;Vibrations;Motors;Haptic interfaces;Accuracy;Belts;Artificial intelligence;Reviews;Abdomen;Egocentric Direction;Azimuth;Elevation;Vibrotactile Stimuli;Torso;Funneling Illusion},
doi={10.1109/TOH.2026.3667214}}This work was supported by a grant 23ZS1200 from ETRI, a grant RS-2024-00437866 from the IITP, and a grant RS-2024-00451947 from the NRF of Korea.