Proactive Robotic Grasp Stability via Tactile Safety Margin Feedback
† Equal contribution
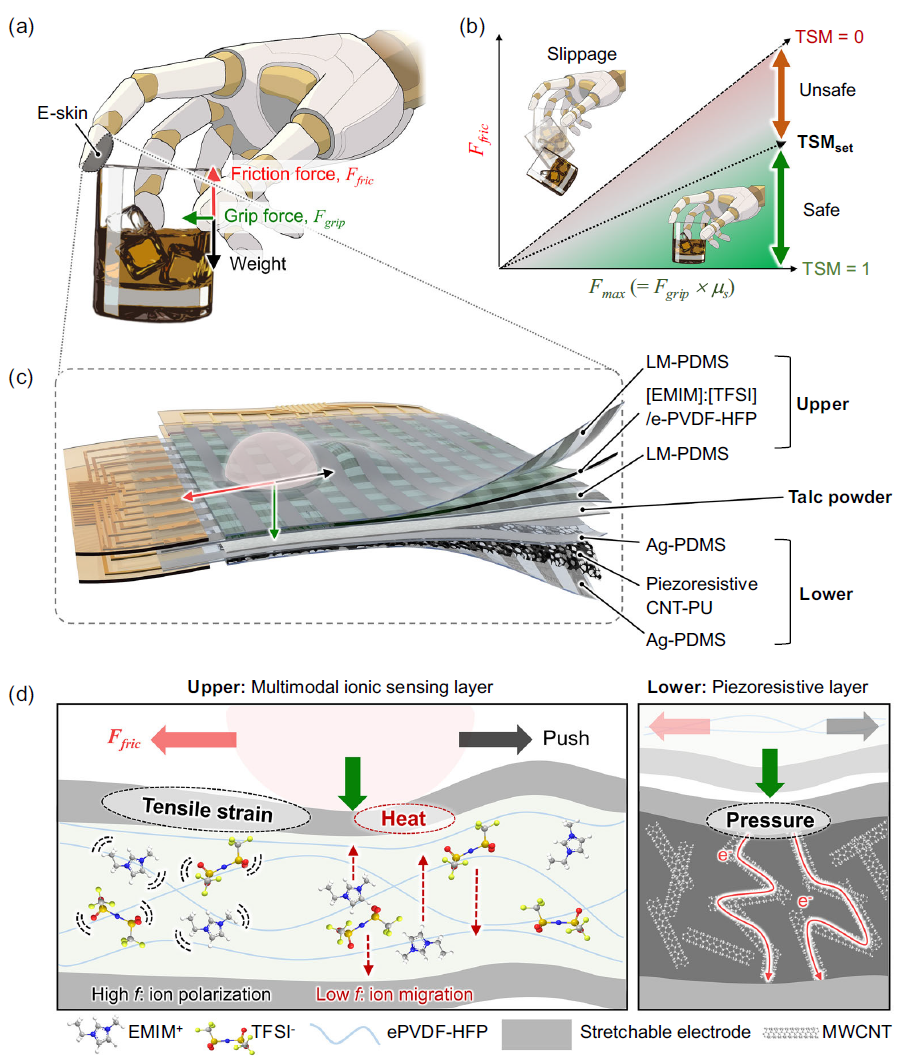
Fig. 1. Concept of TSM and the bilayer E-skin architecture. (a) Robotic grasp mechanics with friction and grip forces. (b) TSM diagram defining safe and unsafe grasping zones. (c) Bilayer E-skin structure. (d) Independent sensing mechanisms for temperature, strain, and pressure.
Abstract
Robotic artificial intelligence requires an artificial tactile sensing system to enable delicate and adaptive task execution with robotic hands. Deformable electronic skin devices can function as a robotic skin, providing real-time monitoring of grasping conditions during manipulation. However, grasp stability has traditionally been assessed only after slippage occurs, due to the lack of an effective feedback system. This work introduces the concept of tactile safety margin (TSM) for the first time, enabling proactive assessment of grasp stability while maintaining contact with target objects. This deterministic metric allows robots to adjust grip force or position to secure object manipulation before slippage occurs. Grasping instability is inferred from surface strain and temperature, both of which are concurrently detected by a deformable multimodal sensor array. The maximum static friction, derived from normal pressure, determines the range of mechanical instability the system can withstand. The integration of ionic multimodal sensor array and piezoresistive sensor array demonstrates independent responsivity to pressure, strain, and temperature within a simple and robust architecture. The effectiveness of TSM is validated through various robotic grasping scenarios, including dynamic thermal tests and pick-and-place tasks. This concept highlights a new role for deformable electronic skin in advancing robotic tactile sensing.
Key Contributions
- 1
Introduces Tactile Safety Margin (TSM), a novel deterministic metric for proactive grasp stability assessment — the first to predict slippage before it occurs
- 2
Develops a bilayer E-skin architecture that simultaneously and independently measures strain, temperature, and normal pressure within a single robust device
- 3
Demonstrates TSM-based proactive feedback across diverse robotic scenarios: dynamic thermal load changes and pick-and-place tasks requiring grip repositioning
- 4
Validates superiority over commercial piezoelectric sensors, which fail to detect gradual grasp deterioration that the TSM-based E-skin correctly identifies
- 5
Establishes a practical framework for integrating TSM thresholds (TSMset) into robotic control loops, enabling autonomous grip force adjustment and re-grasping
E-skin Characterization & TSM Validation
The bilayer E-skin was characterized for its decoupled sensing capabilities. Temperature sensing (via ionic relaxation time τ) remained unaffected by strain up to 50%. Strain sensing (via normalized capacitance C/C₀) was temperature-independent across 20–60°C. The piezoresistive pressure layer was shear-insensitive, thanks to a low-friction talc interface. Both layers maintained stable performance over 1,000 loading cycles. TSM was experimentally validated on a robotic gripper grasping a spherical object under controlled push disturbances, demonstrating proactive stability feedback.
TSM
Core Metric
(Fmax − Ffric) / Fmax
7×7
Sensor Array
2.5 × 2.5 cm robotic E-skin
1,000
Cycle Durability
strain & pressure layers
3
Sensing Modalities
strain · temperature · pressure
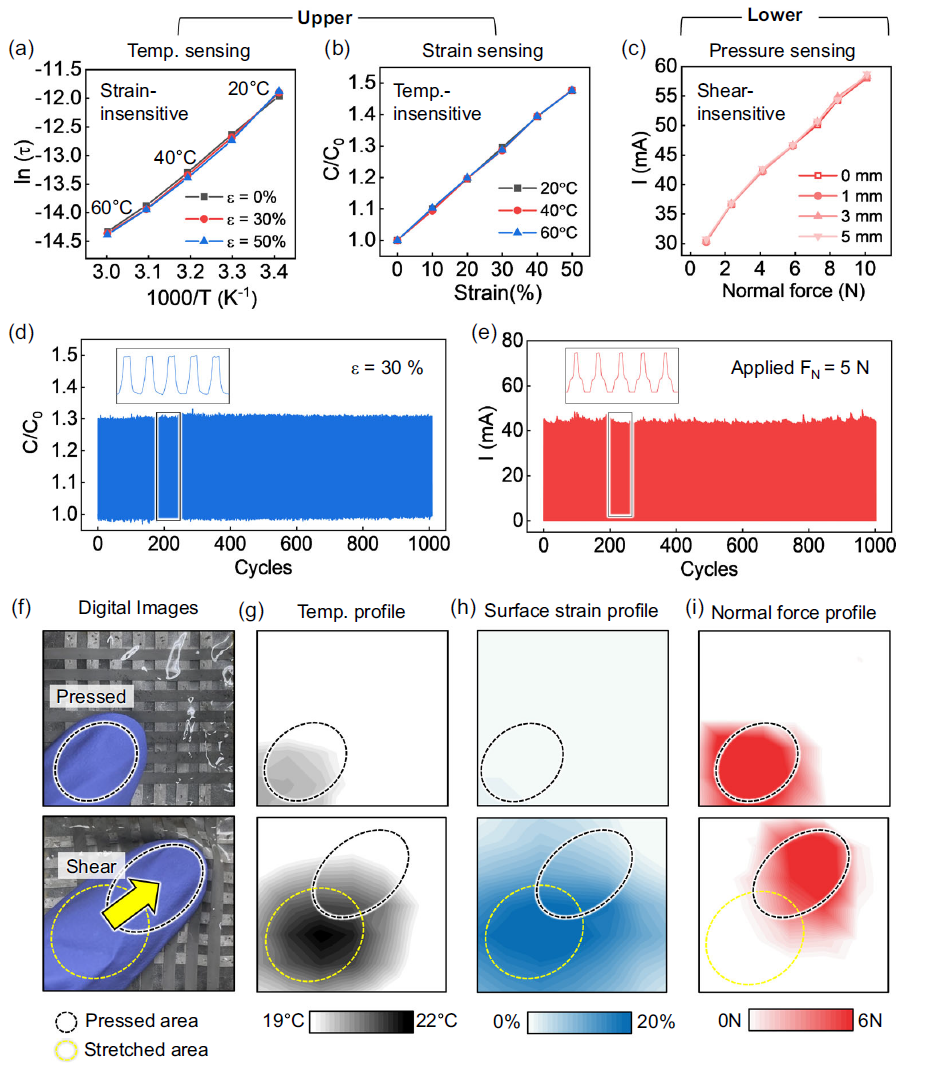
Fig. 2. Decoupled sensing characterization. Temperature, strain, and pressure sensing remain mutually independent under simultaneous stimuli. Spatial mapping shows orthogonal thermal, strain, and force profiles.
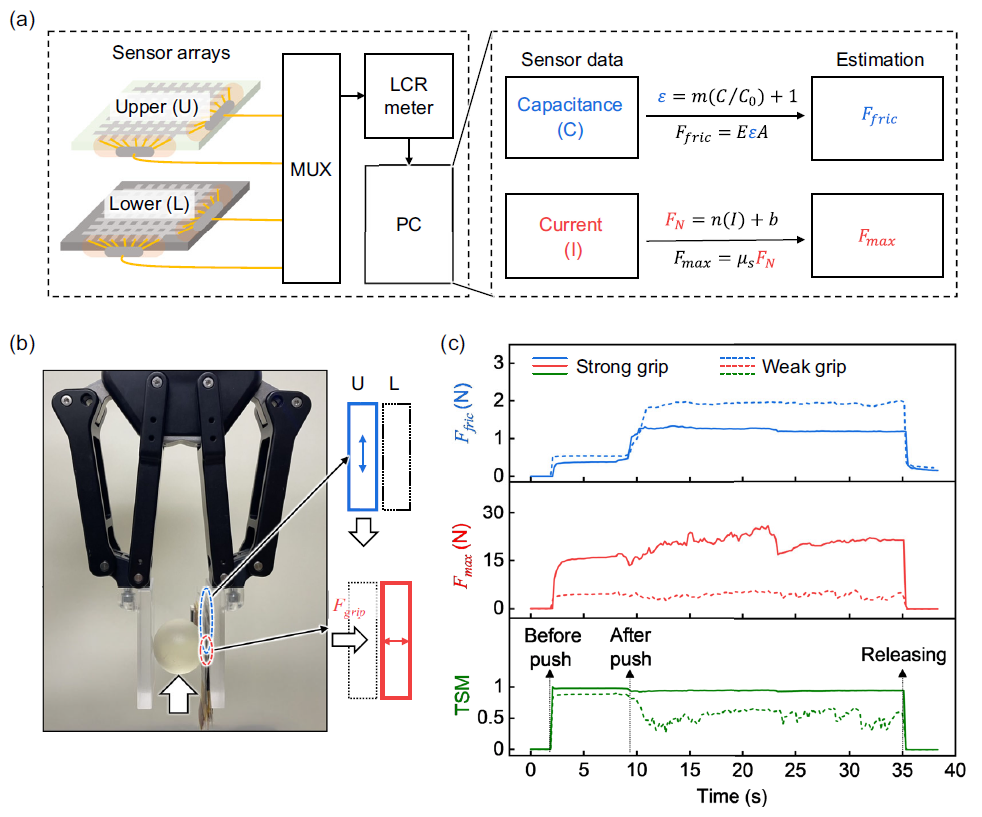
Fig. 3. TSM measurement setup and validation. Strong vs. weak grip conditions produce distinct TSM trajectories before, during, and after push disturbances.
Robotic Demonstrations
The TSM framework was validated in two representative robotic scenarios. In the thermal test, the robot monitored both temperature and TSM to safely grasp and handle a hot water-filled glass. In the pick-and-place task, the robot detected off-center grasping instability from TSM and autonomously repositioned to the center of mass.
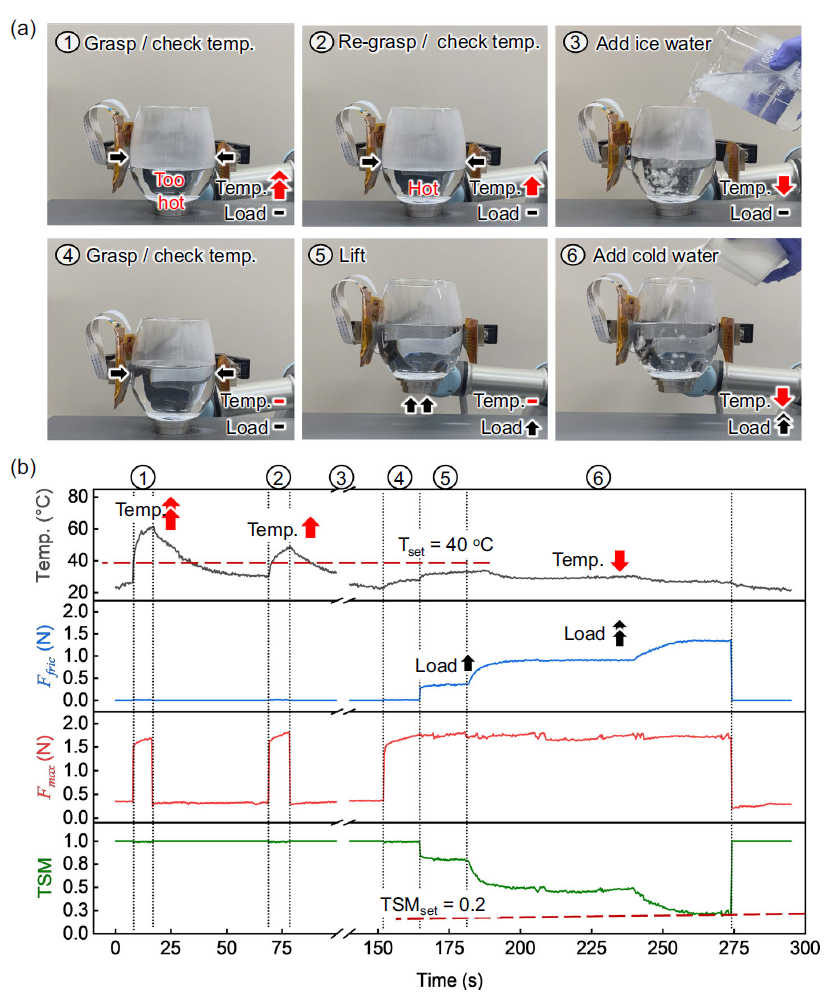
Fig. 4. Thermal grasping test. The robot withholds grasp at 60°C and 48°C until Tset ≤ 40°C is satisfied, then lifts the glass. Adding cold water increases load and drops TSM to TSMset = 0.2.
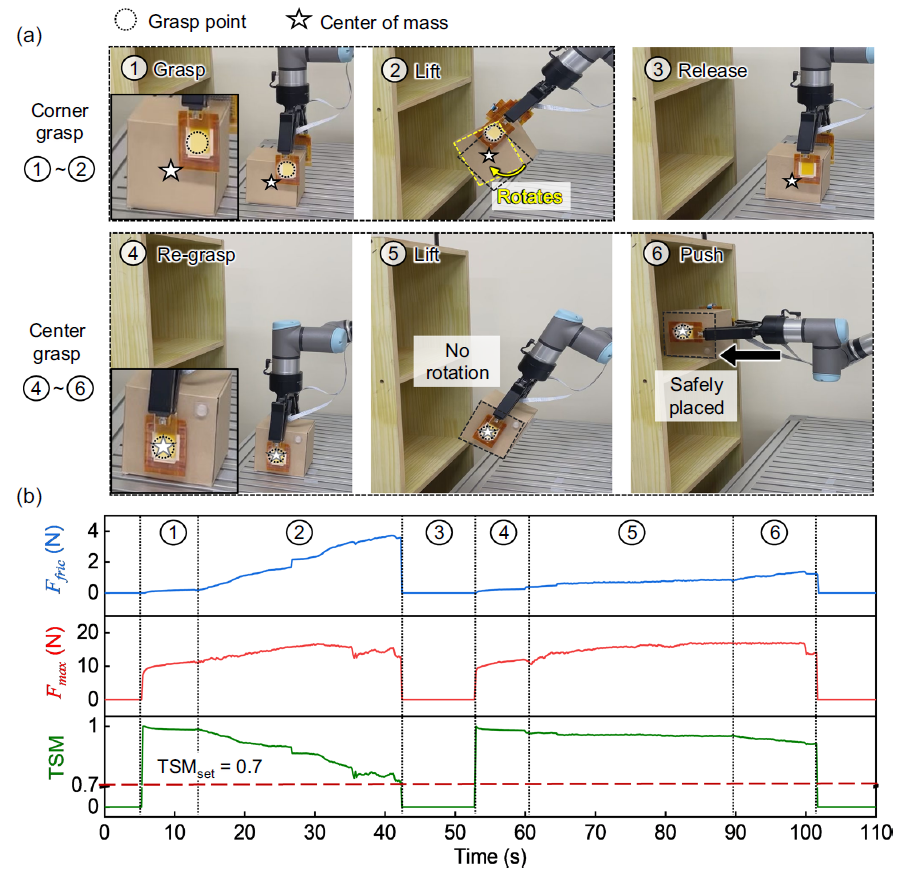
Fig. 5. Adaptive pick-and-place. Off-center grasping causes rotation and TSM drops below TSMset = 0.7, triggering release. Re-grasping at the center of mass enables stable lifting and shelf placement.
Key Findings
The TSM-based E-skin represents a fundamental shift from reactive to proactive tactile sensing in robotic manipulation.
Proactive vs. reactive sensing
Unlike conventional sensors that detect slip only after it occurs, TSM continuously quantifies the ratio between maximum static friction and instantaneous friction force.
Bilayer architecture
The upper ionic layer (LM-PDMS + PVDF-HFP iongel) senses strain and temperature independently, while the lower piezoresistive layer (Ag-PDMS + CNT-PU foam) measures normal pressure.
Decoupled multimodal sensing
Temperature (via relaxation time τ), strain (via normalized capacitance C/C₀), and pressure (via current) are simultaneously measurable without cross-interference.
Durability over 1,000 cycles
Both the strain and pressure sensing layers maintained stable performance across 1,000 loading cycles, confirming suitability for repetitive robotic tasks.
Dynamic thermal grasping
The robot successfully withheld grasping until a hot cup (60°C) cooled below Tset = 40°C, then maintained grip until TSM dropped to TSMset = 0.2 with added water weight.
Adaptive pick-and-place
When an off-center grasp caused rotation (TSM < TSMset = 0.7), the robot automatically repositioned to the center of mass and completed the task successfully.
Citation
@article{Park2026:proactive,
author = {Park, Yebin and Kim, Jaehyun and Kim, Taeyeong and Cho, Woosung and Luo, Junchen and Seong, Myeongryun and Park, Chaeyong and Lee, Anna and Choi, Seungmoon and You, Insang and Jeong, Unyong},
title = {Proactive Robotic Grasp Stability via Tactile Safety Margin Feedback},
journal = {Advanced Intelligent Systems},
volume = {8},
number = {5},
pages = {e202501051},
doi = {https://doi.org/10.1002/aisy.202501051},
url = {https://advanced.onlinelibrary.wiley.com/doi/abs/10.1002/aisy.202501051},
year = {2026}
}This work was supported by the National Research Foundation of Korea (NRF, RS-2024-00338686) and Ministry of Trade Industry & Energy (MOTIE, Korea, RS-2024-00443121).